 GitBucket
GitBucket
Guide to migrate to new Platform porting interface
Contents
1. Introduction
The PSCI implementation in Trusted Firmware has undergone a redesign because of three requirements that the PSCI 1.0 specification introduced :
-
Removing the framework assumption about the structure of the MPIDR, and its relation to the power topology enables support for deeper and more complex hierarchies.
-
Reworking the power state coordination implementation in the framework to support the more detailed PSCI 1.0 requirements and reduce platform port complexity
-
Enable the use of the extended power_state parameter and the larger StateID field
The PSCI 1.0 implementation introduces new frameworks to fulfill the above requirements. These framework changes mean that the platform porting API must also be modified. This document is a guide to assist migration of the existing platform ports to the new platform API.
This document describes the new platform API and compares it with the deprecated API. It also describes the compatibility layer that enables the existing platform ports to work with the PSCI 1.0 implementation. The deprecated platform API is documented for reference.
2. Platform API modification due to PSCI framework changes
This section describes changes to the platform APIs.
2.1 Power domain topology framework platform API modifications
This removes the assumption in the PSCI implementation that MPIDR based affinity instances map directly to power domains. A power domain, as described in section 4.2 of PSCI, could contain a core or a logical group of cores (a cluster) which share some state on which power management operations can be performed. The existing affinity instance based APIs plat_get_aff_count() and plat_get_aff_state() are deprecated. The new platform interfaces that are introduced for this framework are:
plat_core_pos_by_mpidr()plat_my_core_pos()plat_get_power_domain_tree_desc()
plat_my_core_pos() and plat_core_pos_by_mpidr() are mandatory and are meant to replace the existing platform_get_core_pos() API. The description of these APIs can be found in the Porting Guide. These are used by the power domain topology framework such that:
-
The generic PSCI code does not generate MPIDRs or use them to query the platform about the number of power domains at a particular power level. The
plat_get_power_domain_tree_desc()provides a description of the power domain tree on the SoC through a pointer to the byte array containing the power domain topology tree description data structure. -
The linear indices returned by
plat_core_pos_by_mpidr()andplat_my_core_pos()are used to retrieve core power domain nodes from the power domain tree. These core indices are unique for a core and it is a number between0andPLATFORM_CORE_COUNT - 1. The platform can choose to implement a static mapping betweenMPIDRand core index or implement a dynamic mapping, choosing to skip the unavailable/unused cores to compact the core indices.
In addition, the platforms must define the macros PLAT_NUM_PWR_DOMAINS and PLAT_MAX_PWR_LVL which replace the macros PLAT_NUM_AFFS and PLATFORM_MAX_AFFLVL respectively. On platforms where the affinity instances correspond to power domains, the values of new macros remain the same as the old ones.
More details on the power domain topology description and its platform interface can be found in [psci pd tree].
2.2 Composite power state framework platform API modifications
The state-ID field in the power-state parameter of a CPU_SUSPEND call can be used to describe the composite power states specific to a platform. The existing PSCI state coordination had the limitation that it operates on a run/off granularity of power states and it did not interpret the state-ID field. This was acceptable as the specification requirement in PSCI 0.2 and the framework's approach to coordination only required maintaining a reference count of the number of cores that have requested the cluster to remain powered.
In the PSCI 1.0 specification, this approach is non optimal. If composite power states are used, the PSCI implementation cannot make global decisions about state coordination required because it does not understand the platform specific states.
The PSCI 1.0 implementation now defines a generic representation of the power-state parameter :
typedef struct psci_power_state {
plat_local_state_t pwr_domain_state[PLAT_MAX_PWR_LVL + 1];
} psci_power_state_t;
pwr_domain_state is an array where each index corresponds to a power level. Each entry in the array contains the local power state the power domain at that power level could enter. The meaning of the local power state value is platform defined, and can vary between levels in a single platform. The PSCI implementation constraints the values only so that it can classify the state as RUN, RETENTION or OFF as required by the specification:
-
Zero means RUN
-
All OFF state values at all levels must be higher than all RETENTION state values at all levels
The platform is required to define the macros PLAT_MAX_RET_STATE and PLAT_MAX_OFF_STATE to the framework. The requirement for these macros can be found in the [Porting Guide].
The PSCI 1.0 implementation adds support to involve the platform in state coordination. This enables the platform to decide the final target state. During a request to place a power domain in a low power state, the platform is passed an array of requested plat_local_state_t for that power domain by each core within it through the plat_get_target_pwr_state() API. This API coordinates amongst these requested states to determine a target plat_local_state_t for that power domain. A default weak implementation of this API is provided in the platform layer which returns the minimum of the requested local states back to the PSCI state coordination. More details of plat_get_target_pwr_state() API can be found in the Porting Guide.
The PSCI Generic implementation expects platform ports to populate the handlers for the plat_psci_ops structure which is declared as :
typedef struct plat_psci_ops {
void (*cpu_standby)(plat_local_state_t cpu_state);
int (*pwr_domain_on)(u_register_t mpidr);
void (*pwr_domain_off)(const psci_power_state_t *target_state);
void (*pwr_domain_suspend)(const psci_power_state_t *target_state);
void (*pwr_domain_on_finish)(const psci_power_state_t *target_state);
void (*pwr_domain_suspend_finish)(
const psci_power_state_t *target_state);
void (*system_off)(void) __dead2;
void (*system_reset)(void) __dead2;
int (*validate_power_state)(unsigned int power_state,
psci_power_state_t *req_state);
int (*validate_ns_entrypoint)(unsigned long ns_entrypoint);
void (*get_sys_suspend_power_state)(
psci_power_state_t *req_state);
} plat_psci_ops_t;
The description of these handlers can be found in the Porting Guide. The previous plat_pm_ops structure is deprecated. Compared with the previous handlers, the major differences are:
- Difference in parameters
The PSCI 1.0 implementation depends on the validate_power_state handler to convert the power-state parameter (possibly encoding a composite power state) passed in a PSCI CPU_SUSPEND to the psci_power_state format. This handler is now mandatory for PSCI CPU_SUSPEND support.
The plat_psci_ops handlers, pwr_domain_off and pwr_domain_suspend, are passed the target local state for each affected power domain. The platform must execute operations specific to these target states. Similarly, pwr_domain_on_finish and pwr_domain_suspend_finish are passed the local states of the affected power domains before wakeup. The platform must execute actions to restore these power domains from these specific local states.
- Difference in invocation
Whereas the power management handlers in plat_pm_ops used to be invoked for each affinity level till the target affinity level, the new handlers are only invoked once. The target_state encodes the target low power state or the low power state woken up from for each affected power domain.
- Difference in semantics
Although the previous suspend handlers could be used for power down as well as retention at different affinity levels, the new handlers make this support explicit. The pwr_domain_suspend can be used to specify powerdown and retention at various power domain levels subject to the conditions mentioned in section 4.2.1 of PSCI
Unlike the previous standby handler, the cpu_standby() handler is only used as a fast path for placing a core power domain into a standby or retention state.
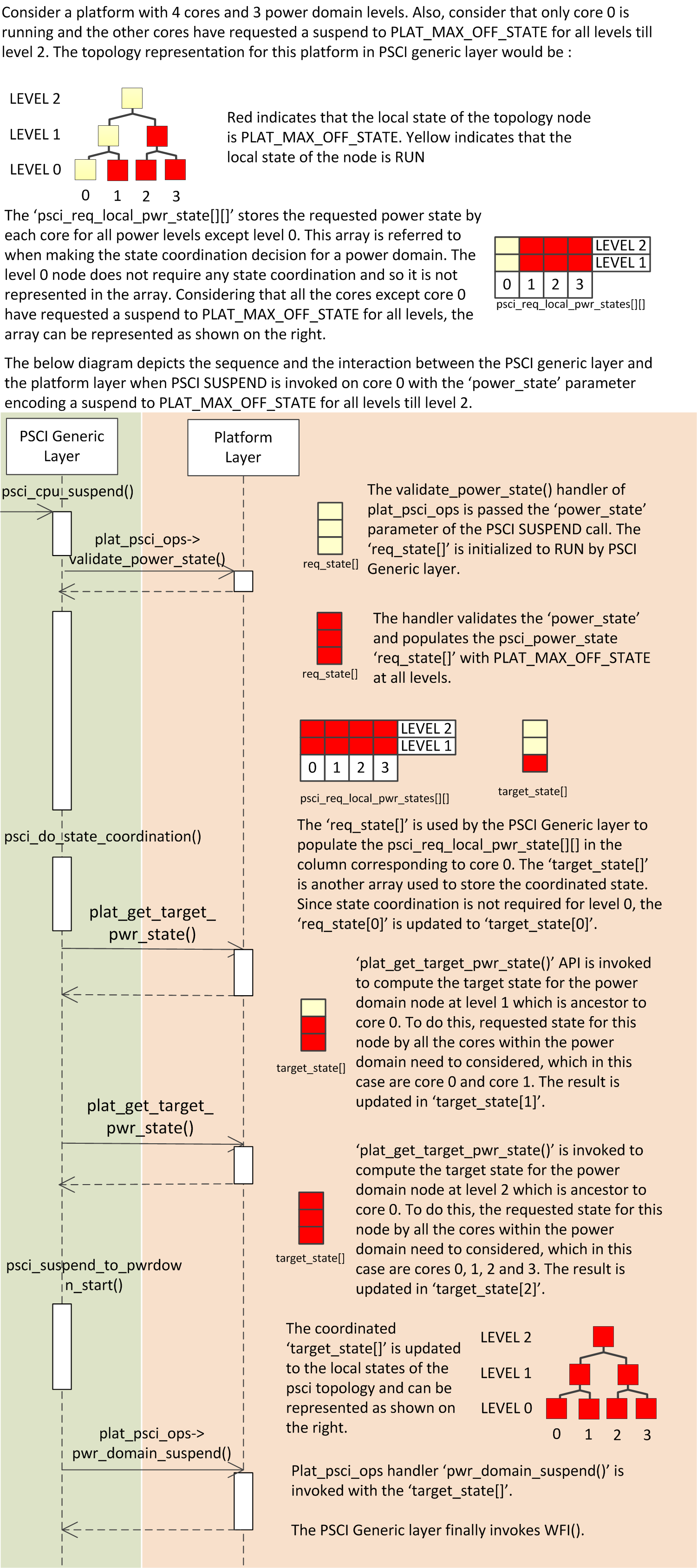
The below diagram shows the sequence of a PSCI SUSPEND call and the interaction with the platform layer depicting the exchange of data between PSCI Generic layer and the platform layer.
Refer plat/arm/board/fvp/fvp_pm.c for the implementation details of these handlers for the FVP. The commit 38dce70f51fb83b27958ba3e2ad15f5635cb1061 demonstrates the migration of ARM reference platforms to the new platform API.
2.3 Miscellaneous modifications
In addition to the framework changes, unification of warm reset entry points on wakeup from low power modes has led to a change in the platform API. In the earlier implementation, the warm reset entry used to be programmed into the mailboxes by the 'ON' and 'SUSPEND' power management hooks. In the PSCI 1.0 implementation, this information is not required, because it can figure that out by querying affinity info state whether to execute the 'suspend_finisher` or 'on_finisher'.
As a result, the warm reset entry point must be programmed only once. The plat_setup_psci_ops() API takes the secure entry point as an additional parameter to enable the platforms to configure their mailbox. The plat_psci_ops handlers pwr_domain_on and pwr_domain_suspend no longer take the warm reset entry point as a parameter.
Also, some platform APIs which took MPIDR as an argument were only ever invoked to perform actions specific to the caller core which makes the argument redundant. Therefore the platform APIs plat_get_my_entrypoint(), plat_is_my_cpu_primary(), plat_set_my_stack() and plat_get_my_stack() are defined which are meant to be invoked only for operations on the current caller core instead of platform_get_entrypoint(), platform_is_primary_cpu(), platform_set_stack() and platform_get_stack().
3. Compatibility layer
To ease the migration of the platform ports to the new porting interface, a compatibility layer is introduced that essentially implements a glue layer between the old platform API and the new API. The build flag ENABLE_PLAT_COMPAT (enabled by default), specifies whether to enable this layer or not. A platform port which has migrated to the new API can disable this flag within the platform specific makefile.
The compatibility layer works on the assumption that the onus of state coordination, in case multiple low power states are supported, is with the platform. The generic PSCI implementation only takes into account whether the suspend request is power down or not. This corresponds with the behavior of the PSCI implementation before the introduction of new frameworks. Also, it assumes that the affinity levels of the platform correspond directly to the power domain levels.
The compatibility layer dynamically constructs the new topology description array by querying the platform using plat_get_aff_count() and plat_get_aff_state() APIs. The linear index returned by platform_get_core_pos() is used as the core index for the cores. The higher level (non-core) power domain nodes must know the cores contained within its domain. It does so by storing the core index of first core within it and number of core indexes following it. This means that core indices returned by platform_get_core_pos() for cores within a particular power domain must be consecutive. We expect that this is the case for most platform ports including ARM reference platforms.
The old PSCI helpers like psci_get_suspend_powerstate(), psci_get_suspend_stateid(), psci_get_suspend_stateid_by_mpidr(), psci_get_max_phys_off_afflvl() and psci_get_suspend_afflvl() are also implemented for the compatibility layer. This allows the existing platform ports to work with the new PSCI frameworks without significant rework.
4. Deprecated Platform API
This section documents the deprecated platform porting API.
Common mandatory modifications
The mandatory macros to be defined by the platform port in platform_def.h
-
#define : PLATFORM_NUM_AFFS
Defines the total number of nodes in the affinity hierarchy at all affinity levels used by the platform.
-
#define : PLATFORM_MAX_AFFLVL
Defines the maximum affinity level that the power management operations should apply to. ARMv8-A has support for four affinity levels. It is likely that hardware will implement fewer affinity levels. This macro allows the PSCI implementation to consider only those affinity levels in the system that the platform implements. For example, the Base AEM FVP implements two clusters with a configurable number of cores. It reports the maximum affinity level as 1, resulting in PSCI power control up to the cluster level.
The following functions must be implemented by the platform port to enable the reset vector code to perform the required tasks.
Function : platform_get_entrypoint() [mandatory]
Argument : unsigned long Return : unsigned long
This function is called with the SCTLR.M and SCTLR.C bits disabled. The core is identified by its MPIDR, which is passed as the argument. The function is responsible for distinguishing between a warm and cold reset using platform- specific means. If it is a warm reset, it returns the entrypoint into the BL31 image that the core must jump to. If it is a cold reset, this function must return zero.
This function is also responsible for implementing a platform-specific mechanism to handle the condition where the core has been warm reset but there is no entrypoint to jump to.
This function does not follow the Procedure Call Standard used by the Application Binary Interface for the ARM 64-bit architecture. The caller should not assume that callee saved registers are preserved across a call to this function.
Function : platform_is_primary_cpu() [mandatory]
Argument : unsigned long Return : unsigned int
This function identifies a core by its MPIDR, which is passed as the argument, to determine whether this core is the primary core or a secondary core. A return value of zero indicates that the core is not the primary core, while a non-zero return value indicates that the core is the primary core.
Common optional modifications
Function : platform_get_core_pos()
Argument : unsigned long Return : int
A platform may need to convert the MPIDR of a core to an absolute number, which can be used as a core-specific linear index into blocks of memory (for example while allocating per-core stacks). This routine contains a simple mechanism to perform this conversion, using the assumption that each cluster contains a maximum of four cores:
linear index = cpu_id + (cluster_id * 4) cpu_id = 8-bit value in MPIDR at affinity level 0 cluster_id = 8-bit value in MPIDR at affinity level 1
Function : platform_set_stack()
Argument : unsigned long Return : void
This function sets the current stack pointer to the normal memory stack that has been allocated for the core specified by MPIDR. For BL images that only require a stack for the primary core the parameter is ignored. The size of the stack allocated to each core is specified by the platform defined constant PLATFORM_STACK_SIZE.
Common implementations of this function for the UP and MP BL images are provided in plat/common/aarch64/platform_up_stack.S and plat/common/aarch64/platform_mp_stack.S
Function : platform_get_stack()
Argument : unsigned long Return : unsigned long
This function returns the base address of the normal memory stack that has been allocated for the core specificed by MPIDR. For BL images that only require a stack for the primary core the parameter is ignored. The size of the stack allocated to each core is specified by the platform defined constant PLATFORM_STACK_SIZE.
Common implementations of this function for the UP and MP BL images are provided in plat/common/aarch64/platform_up_stack.S and plat/common/aarch64/platform_mp_stack.S
Modifications for Power State Coordination Interface (in BL31)
The following functions must be implemented to initialize PSCI functionality in the ARM Trusted Firmware.
Function : plat_get_aff_count() [mandatory]
Argument : unsigned int, unsigned long Return : unsigned int
This function may execute with the MMU and data caches enabled if the platform port does the necessary initializations in bl31_plat_arch_setup(). It is only called by the primary core.
This function is called by the PSCI initialization code to detect the system topology. Its purpose is to return the number of affinity instances implemented at a given affinity level (specified by the first argument) and a given MPIDR (specified by the second argument). For example, on a dual-cluster system where first cluster implements two cores and the second cluster implements four cores, a call to this function with an MPIDR corresponding to the first cluster (0x0) and affinity level 0, would return 2. A call to this function with an MPIDR corresponding to the second cluster (0x100) and affinity level 0, would return 4.
Function : plat_get_aff_state() [mandatory]
Argument : unsigned int, unsigned long Return : unsigned int
This function may execute with the MMU and data caches enabled if the platform port does the necessary initializations in bl31_plat_arch_setup(). It is only called by the primary core.
This function is called by the PSCI initialization code. Its purpose is to return the state of an affinity instance. The affinity instance is determined by the affinity ID at a given affinity level (specified by the first argument) and an MPIDR (specified by the second argument). The state can be one of PSCI_AFF_PRESENT or PSCI_AFF_ABSENT. The latter state is used to cater for system topologies where certain affinity instances are unimplemented. For example, consider a platform that implements a single cluster with four cores and another core implemented directly on the interconnect with the cluster. The MPIDRs of the cluster would range from 0x0-0x3. The MPIDR of the single core is 0x100 to indicate that it does not belong to cluster 0. Cluster 1 is missing but needs to be accounted for to reach this single core in the topology tree. Therefore it is marked as PSCI_AFF_ABSENT.
Function : platform_setup_pm() [mandatory]
Argument : const plat_pm_ops ** Return : int
This function may execute with the MMU and data caches enabled if the platform port does the necessary initializations in bl31_plat_arch_setup(). It is only called by the primary core.
This function is called by PSCI initialization code. Its purpose is to export handler routines for platform-specific power management actions by populating the passed pointer with a pointer to the private plat_pm_ops structure of BL31.
A description of each member of this structure is given below. A platform port is expected to implement these handlers if the corresponding PSCI operation is to be supported and these handlers are expected to succeed if the return type is void.
plat_pm_ops.affinst_standby()
Perform the platform-specific setup to enter the standby state indicated by the passed argument. The generic code expects the handler to succeed.
plat_pm_ops.affinst_on()
Perform the platform specific setup to power on an affinity instance, specified by the MPIDR (first argument) and affinity level (third argument). The state (fourth argument) contains the current state of that affinity instance (ON or OFF). This is useful to determine whether any action must be taken. For example, while powering on a core, the cluster that contains this core might already be in the ON state. The platform decides what actions must be taken to transition from the current state to the target state (indicated by the power management operation). The generic code expects the platform to return E_SUCCESS on success or E_INTERN_FAIL for any failure.
plat_pm_ops.affinst_off()
Perform the platform specific setup to power off an affinity instance of the calling core. It is called by the PSCI CPU_OFF API implementation.
The affinity level (first argument) and state (second argument) have a similar meaning as described in the affinst_on() operation. They identify the affinity instance on which the call is made and its current state. This gives the platform port an indication of the state transition it must make to perform the requested action. For example, if the calling core is the last powered on core in the cluster, after powering down affinity level 0 (the core), the platform port should power down affinity level 1 (the cluster) as well. The generic code expects the handler to succeed.
plat_pm_ops.affinst_suspend()
Perform the platform specific setup to power off an affinity instance of the calling core. It is called by the PSCI CPU_SUSPEND API and SYSTEM_SUSPEND API implementation
The affinity level (second argument) and state (third argument) have a similar meaning as described in the affinst_on() operation. They are used to identify the affinity instance on which the call is made and its current state. This gives the platform port an indication of the state transition it must make to perform the requested action. For example, if the calling core is the last powered on core in the cluster, after powering down affinity level 0 (the core), the platform port should power down affinity level 1 (the cluster) as well.
The difference between turning an affinity instance off and suspending it is that in the former case, the affinity instance is expected to re-initialize its state when it is next powered on (see affinst_on_finish()). In the latter case, the affinity instance is expected to save enough state so that it can resume execution by restoring this state when it is powered on (see affinst_suspend_finish()).The generic code expects the handler to succeed.
plat_pm_ops.affinst_on_finish()
This function is called by the PSCI implementation after the calling core is powered on and released from reset in response to an earlier PSCI CPU_ON call. It performs the platform-specific setup required to initialize enough state for this core to enter the Normal world and also provide secure runtime firmware services.
The affinity level (first argument) and state (second argument) have a similar meaning as described in the previous operations. The generic code expects the handler to succeed.
plat_pm_ops.affinst_suspend_finish()
This function is called by the PSCI implementation after the calling core is powered on and released from reset in response to an asynchronous wakeup event, for example a timer interrupt that was programmed by the core during the CPU_SUSPEND call or SYSTEM_SUSPEND call. It performs the platform-specific setup required to restore the saved state for this core to resume execution in the Normal world and also provide secure runtime firmware services.
The affinity level (first argument) and state (second argument) have a similar meaning as described in the previous operations. The generic code expects the platform to succeed.
plat_pm_ops.validate_power_state()
This function is called by the PSCI implementation during the CPU_SUSPEND call to validate the power_state parameter of the PSCI API. If the power_state is known to be invalid, the platform must return PSCI_E_INVALID_PARAMS as an error, which is propagated back to the Normal world PSCI client.
plat_pm_ops.validate_ns_entrypoint()
This function is called by the PSCI implementation during the CPU_SUSPEND, SYSTEM_SUSPEND and CPU_ON calls to validate the Non-secure entry_point parameter passed by the Normal world. If the entry_point is known to be invalid, the platform must return PSCI_E_INVALID_PARAMS as an error, which is propagated back to the Normal world PSCI client.
plat_pm_ops.get_sys_suspend_power_state()
This function is called by the PSCI implementation during the SYSTEM_SUSPEND call to return the power_state parameter. This allows the platform to encode the appropriate State-ID field within the power_state parameter which can be utilized in affinst_suspend() to suspend to system affinity level. The power_state parameter should be in the same format as specified by the PSCI specification for the CPU_SUSPEND API.
Copyright (c) 2015, ARM Limited and Contributors. All rights reserved.